Yaskawa A1000 CIMR-AU Manuel d'utilisation
Page 196
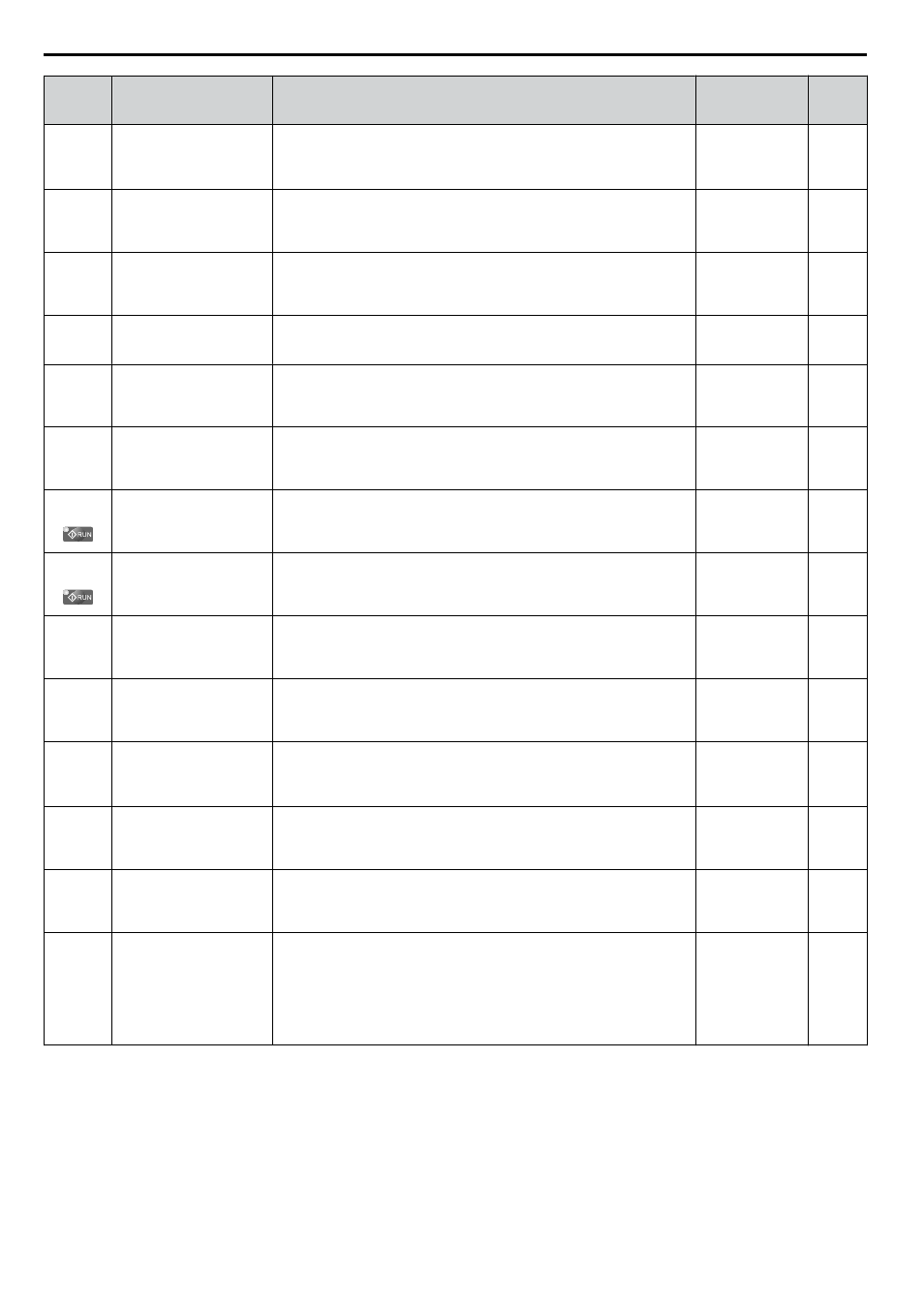
Nº
(Adr.
Hex.)
Nom
Description
Valeurs
Page
b5-15
(1B3)
Niveau du démarrage de la
fonction de sommeil PID
Définit le niveau de fréquence qui déclenche la fonction de sommeil.
Réglage par
défaut:
<1>
Min.: 0.0 Hz
Max.: 400.0 Hz
–
b5-16
(1B4)
Délai du sommeil PID
Définit le délai avant le déclenchement de la fonction de sommeil.
Réglage par
défaut: 0.0 s
Min.: 0.0
Max.: 25.5
–
b5-17
(1B5)
Durée d'accélération/
décélération PID
Définit la durée d'accélération et de décélération vers le point de consigne
PID.
Réglage par
défaut: 0.0 s
Min.: 0.0
Max.: 6000.0
–
b5-18
(1DC)
Sélection du point de
consigne PID
0: désactivée
1: activée
Réglage par
défaut: 0
Plage: 0, 1
–
b5-19
(1DD)
Valeur du point de
consigne PID
Définit la valeur cible PID lorsque b5-18 = 1. Définie sous forme de
pourcentage de la fréquence de sortie maximale.
Réglage par
défaut: 0.00%
Min.: 0.00
Max.: 100.00
–
b5-20
(1E2)
Changement d'échelle du
point de consigne PID
0: unités de 0.01 Hz
1: unités de 0.01% (100% = fréquence de sortie maximale)
2: tr/min (le nombre de pôles du moteur doit être saisi)
3: défini par l'utilisateur (régler le changement d'échelle à b5-38 et b5-39)
Réglage par
défaut: 1
Plage: 0 à 3
–
b5-34
(19F)
Limite inférieure de la
sortie PID
Définit la sortie minimale possible depuis le contrôleur PID sous forme de
pourcentage de la fréquence de sortie maximale.
Réglage par
défaut: 0.00%
Min.: -100.00
Max.: 100.00
–
b5-35
(1A0)
Limite de l'entrée PID
Limite l'entrée du contrôle PID (signal de déviation) sous forme de
pourcentage de la fréquence de sortie maximale. Agit comme limite
bipolaire.
Réglage par
défaut: 1000.0%
Min.: 0.0
Max.: 1000.0
–
b5-36
(1A1)
Niveau de détection élevée
de la rétroaction PID
Définit le niveau de détection élevée de rétroaction PID sous forme de
pourcentage de la fréquence de sortie maximale.
Réglage par
défaut: 100%
Min.: 0
Max.: 100
–
b5-37
(1A2)
Durée de la détection élevée
de rétroaction PID
Définit le délai de détection élevée de rétroaction PID.
Réglage par
défaut: 1.0 s
Min.: 0.0
Max.: 25.5
–
b5-38
(1FE)
Affichage du point de
consigne PID de
l'utilisateur
Définit la valeur d'affichage d'U5-01 et U5-04 lorsque la fréquence
maximale est transmise.
Réglage par
défaut:
<2>
Min.: 1
Max.: 60000
–
b5-39
(1FF)
Chiffres d'affichage du
point de consigne PID
0: aucune décimale
1: une décimale
2: deux décimales
3: trois décimales
Réglage par
défaut:
<2>
Plage: 0 à 3
–
b5-40
(17F)
Contenu du moniteur de la
référence de fréquence
pendant le PID
0: affiche la référence de fréquence (U1-01) une fois que la compensation
PID a été ajoutée.
1: affiche la référence de fréquence (U1-01) avant l'ajout de la compensation
PID.
Réglage par
défaut: 0
Plage: 0, 1
–
b5-47
<3>
(17D)
Sélection du
fonctionnement en marche
arrière 2 par sortie PID
Sélection du fonctionnement en marche arrière lorsque b5-01 = 3 ou 4.
0: limite zéro lorsque la sortie PID est une valeur négative.
1: fonctionnement en marche arrière lorsque la sortie PID est une valeur
négative
(limite zéro si le fonctionnement en marche arrière est interdit par b1-04).
Note:
ce paramètre n'est pas disponible pour les modèles CIMR-
Ao4A0930 et 4A1200.
Réglage par
défaut: 1
Plage: 0, 1
–
<1> Le réglage par défaut est déterminé par le paramètre A1-02, sélection de la méthode de contrôle.
<2> Le réglage par défaut dépend du paramètre b5-20, changement d'échelle du point de consigne PID.
<3> Disponibles dans la version 1015 ou supérieure du logiciel du variateur de vitesse.
B.2 b: application
196
YASKAWA ELECTRIC Manuel de mise en route rapide du variateur de vitesse c.a. Yaskawa – A1000 (TOFP C710616 41C)