Modes fcr et fvr, Paramètres de stabilité du mode fcr – Basler Electric DECS-250 Manuel d'utilisation
Page 135
9440370990 Rev H
119
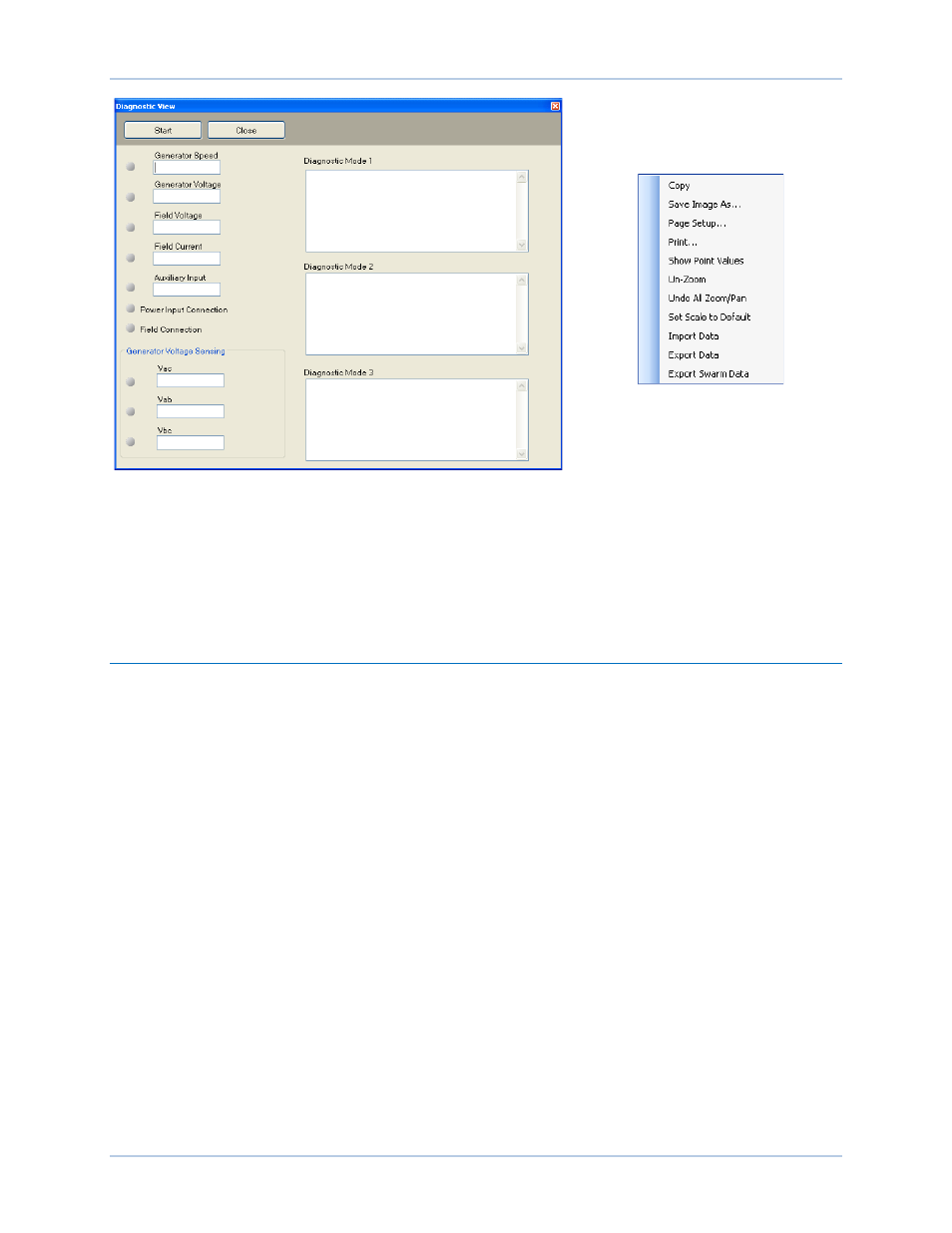
Figure 101. Fenêtre Diagnostic View (vue diagnostic)
Figure 102. Menu contextuel des
graphiques
Faites un clic droit sur les graphiques pour afficher le menu contextuel (Figure 102) qui vous permettra de
copier, d'enregistrer, d'imprimer, d'importer ou d'exporter les données de graphique. Vous avez
également la possibilité d'afficher ou de masquer les valeurs de point, de zoomer sur le graphique et de
rétablir l'échelle par défaut. Utilisez la roulette de la souris lorsque le curseur est sur un graphique pour
réaliser des zoom avant ou arrière.
Modes FCR et FVR
Chemin d'accès BESTCOMSPlus
®
: Settings Explorer, Operating Settings, Gain, FCR/FVR
Chemin d'accès IHM : Settings, Operating Settings, Gains, FCR Gains or FVR Gains
Vous pouvez personnaliser l'ajustement de stabilité pour optimiser les performances lorsque les modes
FCR (régulation de courant d'excitation) ou FVR (régulation de tension d'excitation) sont activés. Les
paramètres de stabilité des modes FCR et FVR dans BESTCOMSPlus sont illustrés dans la Figure 103.
Paramètres de stabilité du mode FCR
Le système DECS-250 établit sa sortie de courant d'excitation d'après les paramètres suivants.
Le gain proportionnel (Kp)
A
est le facteur de l'erreur entre la valeur de consigne du courant d'excitation et
la valeur réelle du courant d'excitation. Diminuer Kp permet de réduire le dépassement de la réponse
transitoire. Augmenter Kp permet de réduire le temps de réponse transitoire.
Le gain intégral (Ki)
B
est le facteur de l'intégrale de l'erreur entre la valeur de consigne du courant et la
valeur réelle du courant d'excitation. Augmenter Ki permet de réduire le temps nécessaire pour atteindre
un état stationnaire.
Le gain dérivé (Kd)
C
est le facteur de la dérivée de l'erreur entre la valeur de consigne du courant et la
valeur réelle du courant d'excitation. Augmenter Kd permet de réduire la résonance de la réponse
transitoire.
D'autres paramètres de stabilité du mode FCR permettent d'éliminer les effets de bruit sur la
différenciation numérique (constante de temps de dérivation Td)
D
et de définir le niveau de gain du
régulateur de tension de l'algorithme PID (Ka)
E
à l'aide des calculs de gain recommandés
F
.
DECS-250
Stability Tuning