Attention – Basler Electric DECS-250 Manuel d'utilisation
Page 132
116
9440370990 Rev H
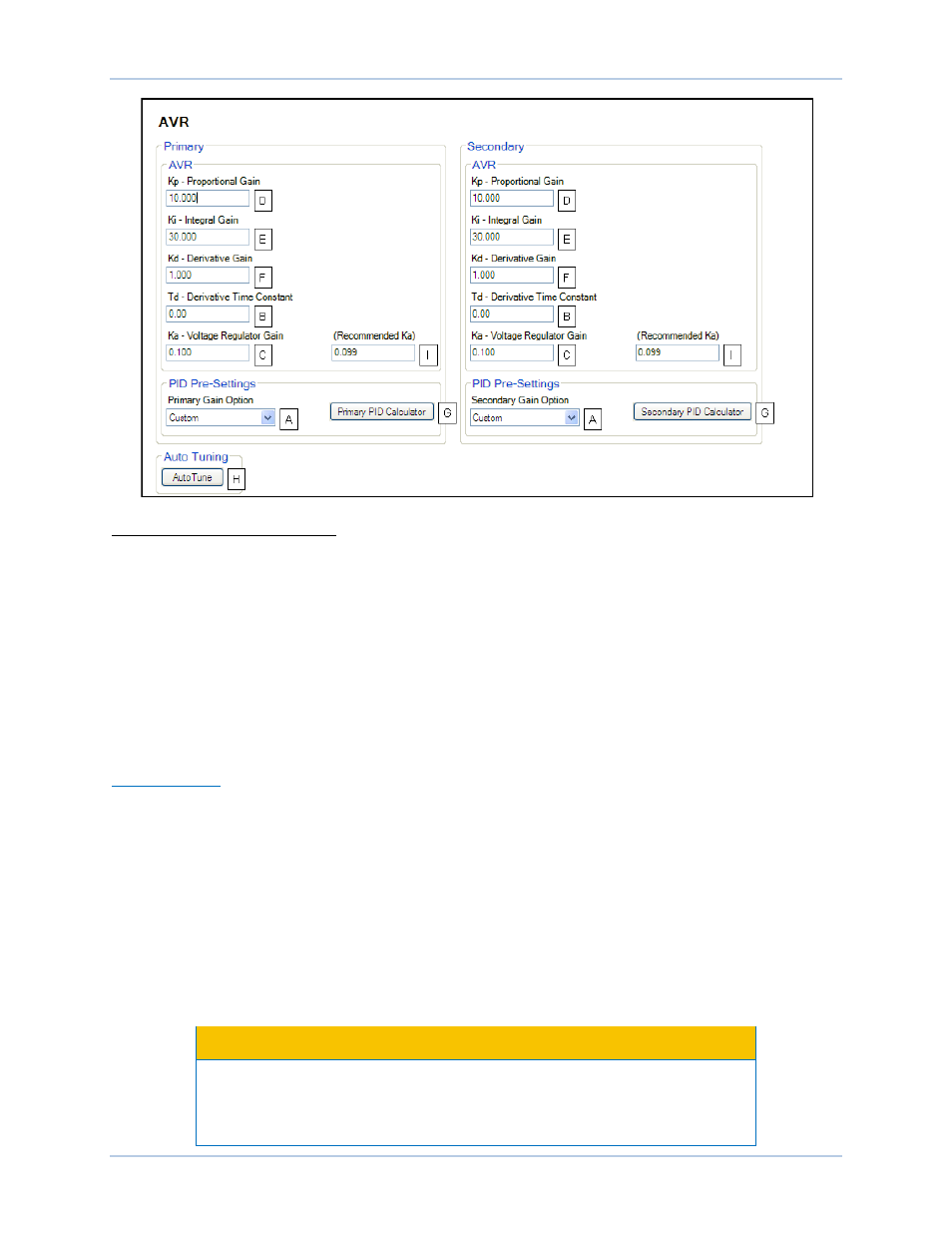
Figure 98. paramètres de stabilité AVR
A
Gain Option (option de gain) : T'do=1,0 Te=0,17, T'do=1,5 Te=0,25, T'do=2,0 Te=0,33, T'do=2,5
Te=0,42, T'do=3,0 Te=0,50, T'do=3,5 Te=0,58, T'do=4,0 Te=0,67, T'do=4,5 Te=0,75, T'do=5,0 Te=0,83,
T'do=5,5 Te=0,92, T'do=6,0 Te=1,00, T'do=6,5 Te=1,08, T'do=7,0 Te=1,17, T'do=7,5 Te=1,25, T'do=8,0
Te=1,33, T'do=8,5 Te=1,42, T'do=9,0 Te=1,50, T'do=9,5 Te=1,58, T'do=10,0 Te=1,67, T'do=10,5
Te=1,75 ou Custom (Personnalisé).
B
Td – AVR Derivative Time Constant (constante de temps de dérivation AVR) : réglable entre 0 et 1 par
incréments de 0,01.
C
Ka – Voltage Regulator Gain (gain du régulateur de tension) : réglable entre 0 et 1 par incréments de
0,001.
D
Kp – Proportional Gain (gain proportionnel) : réglable entre 0 et 1 000 par incréments de 0,1.
E
Ki – Integral Gain (gain intégral) : réglable entre 0 et 1 000 par incréments de 0,1.
F
Kd – Derivative Gain (gain dérivé) : valeurs comprises entre 0 et 1 000 par incréments de 0,1.
Calculateur PID
Le calculateur PID peut être activé à l'aide du bouton correspondant (Figure 98, lettre G), uniquement
lorsque l'option de gain primaire est définie sur « Custom » (Personnalisé). Le calculateur PID (Figure 99)
calcule les paramètres de gain Kp
A
, Ki
B
et Kd
C
en fonction des constantes de temps de l'alternateur (T'do)
D
et de l'excitatrice (Te)
E
. Si cette dernière n'est pas définie, vous pouvez appliquer la valeur par défaut
F
, qui
correspond à 1/6
e
de la constante de temps de l'alternateur. Un champ de paramètre de la constante de
temps de dérivation (Td)
G
permet d'éliminer les effets de bruit sur la différenciation numérique. Un champ
de paramètre du gain du régulateur de tension (Ka)
H
permet de définir le niveau du gain du régulateur de
tension de l'algorithme PID. Les paramètres calculés et renseignés peuvent être appliqués
I
à la
fermeture
J
de la calculatrice PID.
Vous pouvez enregistrer un groupe de paramètres sous un nom de fichier unique et l'ajouter à une liste
d'enregistrements de paramètres de gain prêts à être appliqués. Une fois les paramètres de stabilité
définis, vous pouvez supprimer les enregistrements inutiles de la liste.
Attention
Les valeurs de PID calculées ou définies par l'utilisateur doivent être mises en
œuvre seulement une fois que l'utilisateur a vérifié qu'elles étaient appropriées
à l'application. Des valeurs PID incorrectes peuvent avoir une incidence
négative sur la performance du système ou endommager l'équipement.
Stability Tuning
DECS-250