Pss power input signal, Dérivée du signal de puissance mécanique, Sélection du signal stabilisateur – Basler Electric DECS-250 Manuel d'utilisation
Page 122
106
9440370990 Rev H
Figure 87. Signal de puissance électrique de l'alternateur
Après le filtrage passe-haut, le signal de puissance électrique est intégré et mis à l'échelle, par la
combinaison de la constante d'inertie de l'alternateur
O
(2H) avec le signal de vitesse. Le filtrage passe-
bas effectué dans l'intégrateur est contrôlé par la constante de temps TI2
P
.
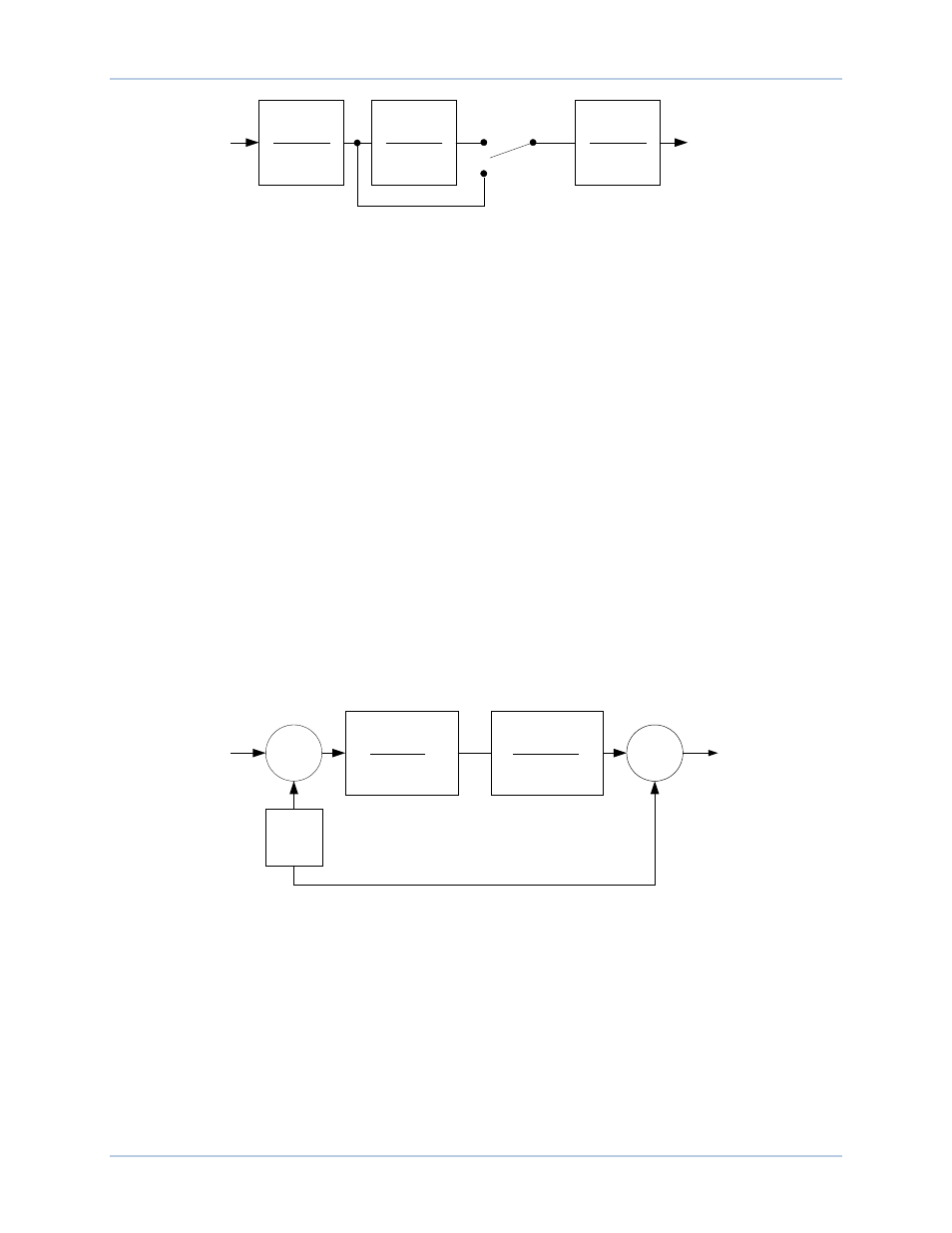
Dérivée du signal de puissance mécanique
Le signal d'écart de vitesse et l'intégrale du signal de différence de puissance électrique sont combinés
pour produire une action intégrale dérivée du signal de puissance mécanique.
Un étage de gain ajustable, Kpe
Q
, définit l'amplitude de l'entrée de puissance électrique utilisée par la
fonction PSS.
L'intégrale dérivée du signal de puissance mécanique est ensuite filtrée par un filtre passe-bas de
puissance mécanique et un filtre suiveur de rampe. Le filtre passe-bas est contrôlé par la constante de
temps TI3
R
et fournit une atténuation des composantes de torsion qui apparaissent dans le signal d'entrée
de vitesse. Le filtre suiveur de rampe produit une erreur d'état stationnaire de zéro aux changements de
la rampe dans l'intégrale du signal d'entrée de puissance électrique. Ceci limite la variation de sortie du
stabilisateur à des niveaux très bas pour les fréquences de variation de la puissance mécanique
normalement rencontrées durant le fonctionnement des alternateurs industriels (à grande échelle). Le
filtre suiveur de rampe est contrôlé par la constante de temps Tr
S
. Un exposant composé d'un
numérateur
T
et d'un dénominateur
U
est appliqué au filtre de puissance mécanique.
Le traitement de l'intégrale dérivée du signal de puissance mécanique est illustré dans la Figure 88.
Figure 88. Dérivée du signal de puissance mécanique
Sélection du signal stabilisateur
La Figure 89 illustre la manière dont les commutateurs logiciels SSW 2
V
et SSW 3
W
permettent de
sélectionner le signal stabilisateur. La dérivée de l'écart de vitesse est sélectionnée en tant que signal
stabilisateur lorsque le paramètre SSW 2 est Derived Speed (dérivée de la vitesse) et que le paramètre
SSW 3 est Derived Frequency/Speed (dérivée de la fréquence/vitesse). La vitesse filtrée est sélectionnée
en tant que signal stabilisateur lorsque le paramètre SSW 2 est Frequency (fréquence) et que le
paramètre SSW 3 est Derived Frequency/Speed (dérivée de la fréquence/vitesse). La vitesse filtrée est
sélectionnée en tant que signal stabilisateur lorsque le paramètre SSW 3 est Power (puissance).
(Lorsque le paramètre SSW 3 est Power (puissance), le paramètre SSW 2 est sans effet.)
SSW 1
Disable
Enable
Power
Washed Out
Power
P0026-14
sT
w3
1+ sT
w3
sT
w4
1+ sT
w4
T
l2
/ 2H
1+ sT
l2
PSS Power Input Signal
Σ
Σ
+
+
K
PE
Washed
Out
Speed
Derived
Speed
Deviation
P0026-15
(
)
N
M
L
sT
−
+
3
1
1
N
L
R
sT
sT
+
+
3
1
1
Stabilisateur de système de puissance
DECS-250