HEIDENHAIN PWM 9 Manuel d'utilisation
Page 123
Manuel d’utilisation PWM 9 HEIDENHAIN
123
Variantes de spécifications
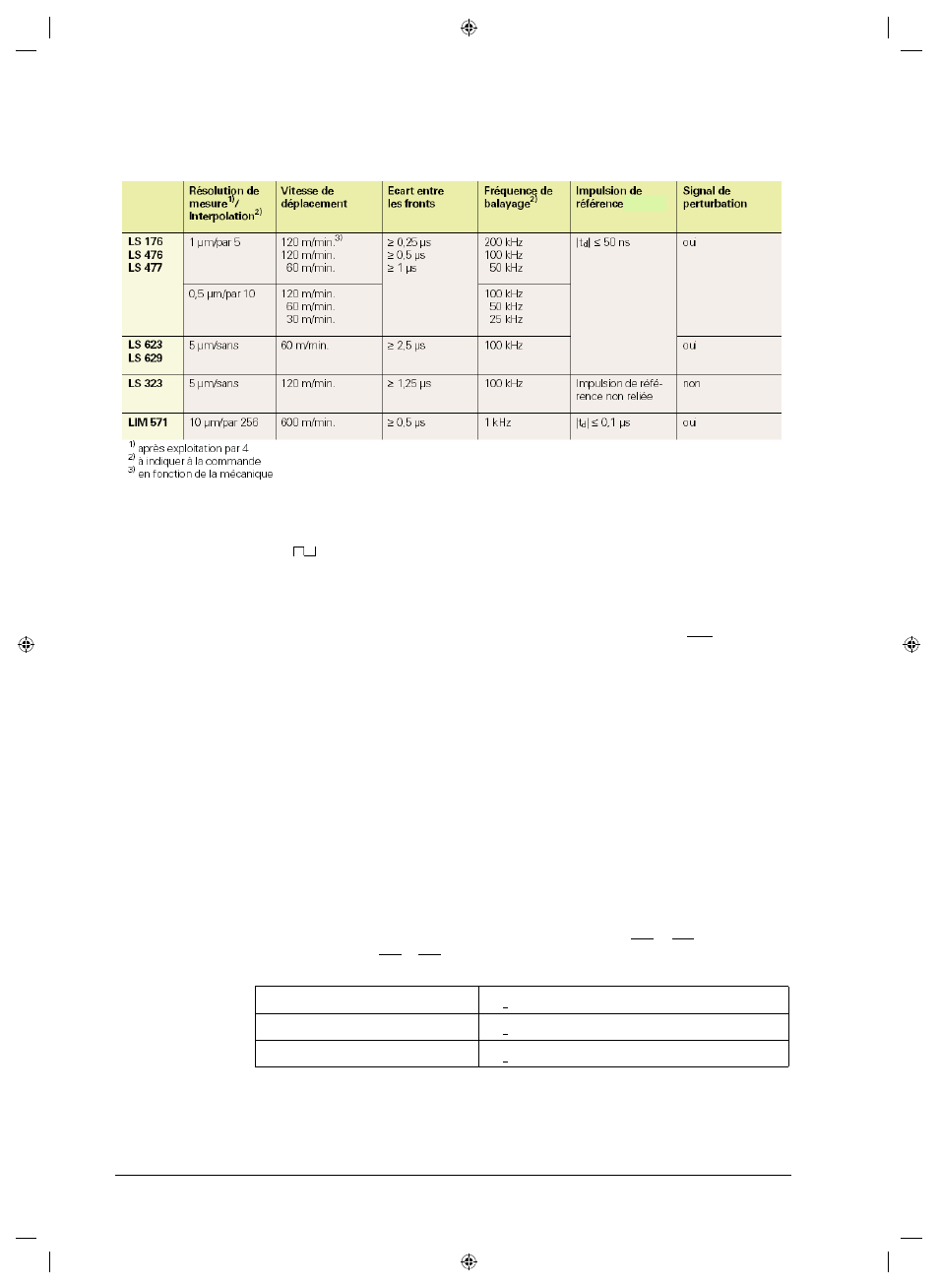
8.2.2 Signaux incrémentaux
HTL avec interface rectangulaire
Les capteurs rotatifs délivrant des signaux rectangulaires HTL comportent des électroniques qui
digitalisent les signaux de balayage sinusoïdaux. Les signaux de sortie sont constitués de 2
impulsions rectangulaires Ua1 et Ua2
déphasées de 90° él. ainsi que d'une impulsion de
référence Ua0 reliée aux signaux incrémentaux. Un signal de perturbation UaS indique les
fonctions défectueuses, par exemple, une rupture des fils d'alimentation, une panne de source
lumineuse, etc. Pour chaque signal rectangulaire, l'électronique intégrée délivre également son
signal inverse (sauf pour les ERN / ROD 1x30).
La résolution de mesure résulte de l'écart entre deux fronts des deux signaux Ua1 et Ua2
après
exploitation par 1, par 2 ou par 4.
L'électronique consécutive doit être conçue pour permettre d’enregistrer chaque front des
impulsions rectangulaires. L'écart minimal a entre les fronts indiqué dans les caractéristiques
techniques s'applique à une mesure réalisée en sortie du récepteur de ligne différentiel indiqué.
Pour éviter les erreurs de comptage, il faut donc concevoir l'électronique consécutive de
manière à pouvoir encore traiter 90 % de l'écart a entre les fronts.
Il convient de ne pas dépasser, même brièvement, la vitesse de rotation ou la vitesse de
déplacement max. admissible.
Exemple de
systèmes de
mesure
ERN 130, ERN 430, ERN 1030, ROD 43x, ROD 1030
Signaux
incrémentaux
2 signaux rectangulaires HTL Ua1 et Ua2 et leurs signaux inverses Ua1 et Ua2
(ERN/ROD 1x30 sans Ua1 ni Ua2)
Retard
Ecart entre les fronts
a 0,45 µs à la fréquence de balayage de 300 kHz
a 0,8 µs à la fréquence de balayage de 160 kHz
a 1,3 µs à la fréquence de balayage de 100 kHz
>
>
>
PWM9_11_2007_fr_SW_07.pdf 123
13.12.2007 10:44:02