Signal de puissance mécanique dérivé -30, Sélection du signal de stabilisation -30 – Basler Electric DECS-400 Manuel d'utilisation
Page 84
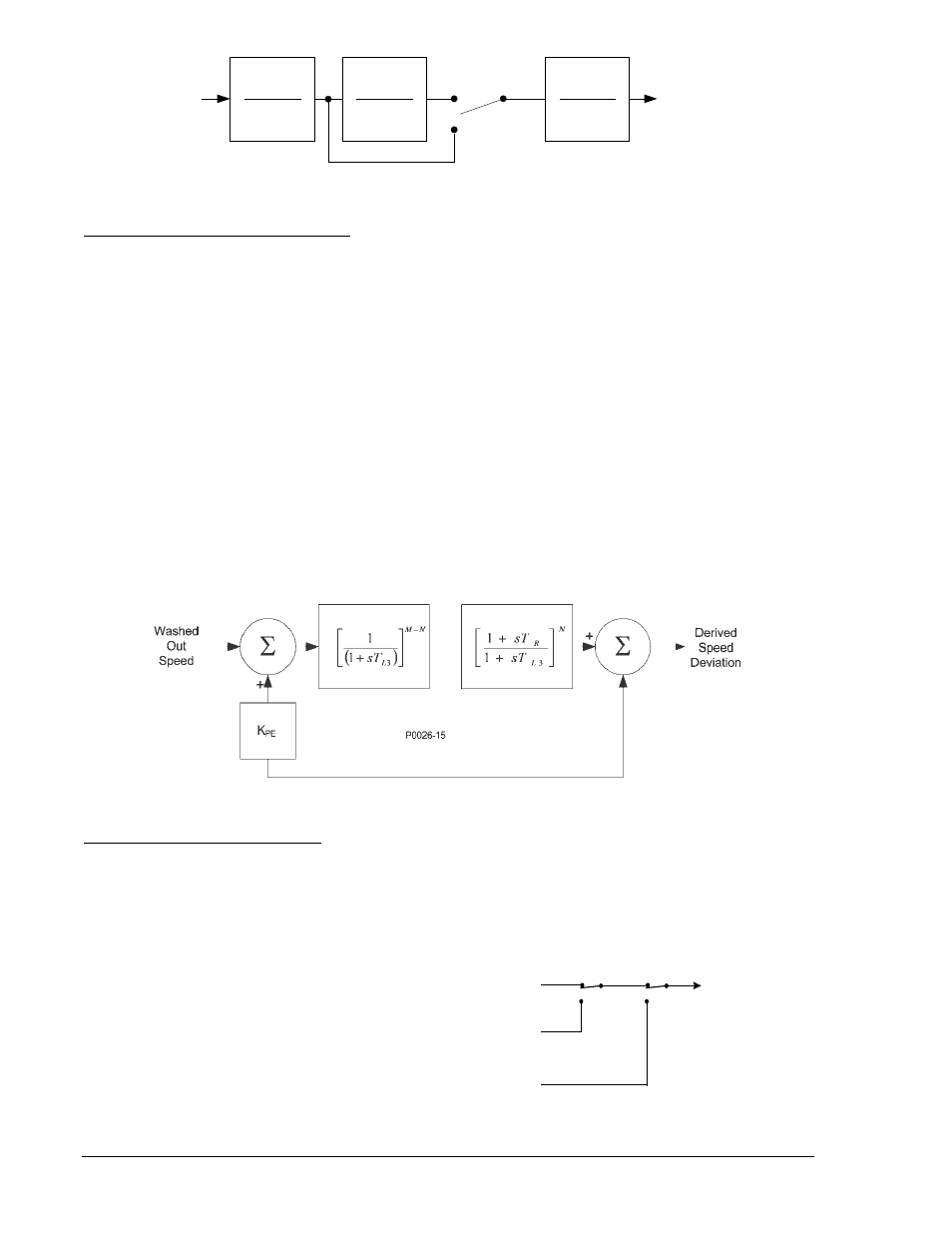
Figure 3-17. Signal de puissance électrique de l'alternateur
Signal de puissance mécanique dérivé
Le signal d'écart de vitesse et l'intégrale du signal d'écart de puissance électrique sont combinés pour
produire un signal dérivé, l'intégrale du signal de puissance mécanique.
Une étape de gain ajustable, Kpe, est fournie. Sa plage de réglage est comprise entre 0 et 2, par
incréments de 0,01. Le paramètre Kpe est accessible dans l'onglet Paramètres de l'écran PSS du logiciel
BESTCOMS.
L'intégrale dérivée du signal de puissance mécanique est ensuite filtrée par un filtre passe-bas de
puissance mécanique et un filtre de poursuite d'inclinaison. Le filtre passe-bas est contrôlé par la
constante de temps TI3 et fournit une atténuation des composantes qui apparaissent dans le chemin
d'entrée de vitesse. La plage de réglage du paramètre TI3 est comprise entre 0,05 et 0,20 seconde, par
incréments de 0,01 seconde. Le filtre de poursuite d'inclinaison produit une erreur d'état d'équilibre de
zéro pour niveler les variations dans l'intégrale du signal d'entrée de puissance électrique. Ceci limite la
variation de sortie du stabilisateur à des niveaux très bas pour les fréquences de variation de la
puissance mécanique normalement rencontrées durant le fonctionnement des alternateurs de taille
industrielle. Le filtre de poursuite d'inclinaison est contrôlé par la constante de temps Tr. La plage de
réglage du paramètre TI3 est comprise entre 0,05 et 1 seconde, par incréments de 0,01 seconde. Les
constantes de temps de filtre passe-bas et de filtre de poursuite d'inclinaison peuvent être configurées
dans l'onglet Paramètres de l'écran PSS du logiciel BESTCOMS.
Le traitement de l'intégrale dérivée du signal de puissance mécanique est illustré dans la Figure 3-18.
Figure 3-18. Signal de puissance mécanique dérivé
Sélection du signal de stabilisation
La Figure 3-19 illustre la manière dont les
commutateurs virtuels SSW 2 et SSW 3 sont
utilisés pour sélectionner le signal de
stabilisation. L'écart de vitesse dérivé est
sélectionné en tant que signal de stabilisation
lorsque le paramètre SSW 2 est « Vitesse
dérivée » et que le paramètre SSW 3 est «
Fréquence/vitesse dérivée ». La vitesse de
déperdition est sélectionnée en tant que signal
de stabilisation lorsque le paramètre SSW 2 est
« Fréquence » et que le paramètre SSW 3 est «
Fréquence/vitesse dérivée ». La vitesse de
déperdition est sélectionnée en tant que signal
de stabilisation lorsque le paramètre SSW 3 est
« Puissance ». (Lorsque le paramètre SSW 3
est « Puissance », le paramètre SSW 2 est sans
effet.) Les commutateurs virtuels SSW 2 et SSW
3 peuvent être configurés dans l'onglet Contrôle
de l'écran PSS du logiciel BESTCOMS.
Figure 3-19. Sélection du signal de stabilisation
SSW 1
Disable
Enable
Power
Washed Out
Power
P0026-14
11-19-04
sT
w3
1+ sT
w3
sT
w4
1+ sT
w4
T
l2
/ 2H
1+ sT
l2
P0026-19
12-09-04
Derived
Speed
Deviation
SSW 2
Washed
Out Speed
SSW 3
Stabilizing
Signal
Washed
Out Power
3-30
DECS-400 - Description fonctionnelle
9369770990 Rev R