HEIDENHAIN PT 855 for Milling Manuel d'utilisation
Page 10
I
- 1
Principes de base pour les coordonnées de positions
POSITIP 855
Manuel de l'utilisateur
11
Principes de base pour les coordonnées de positions
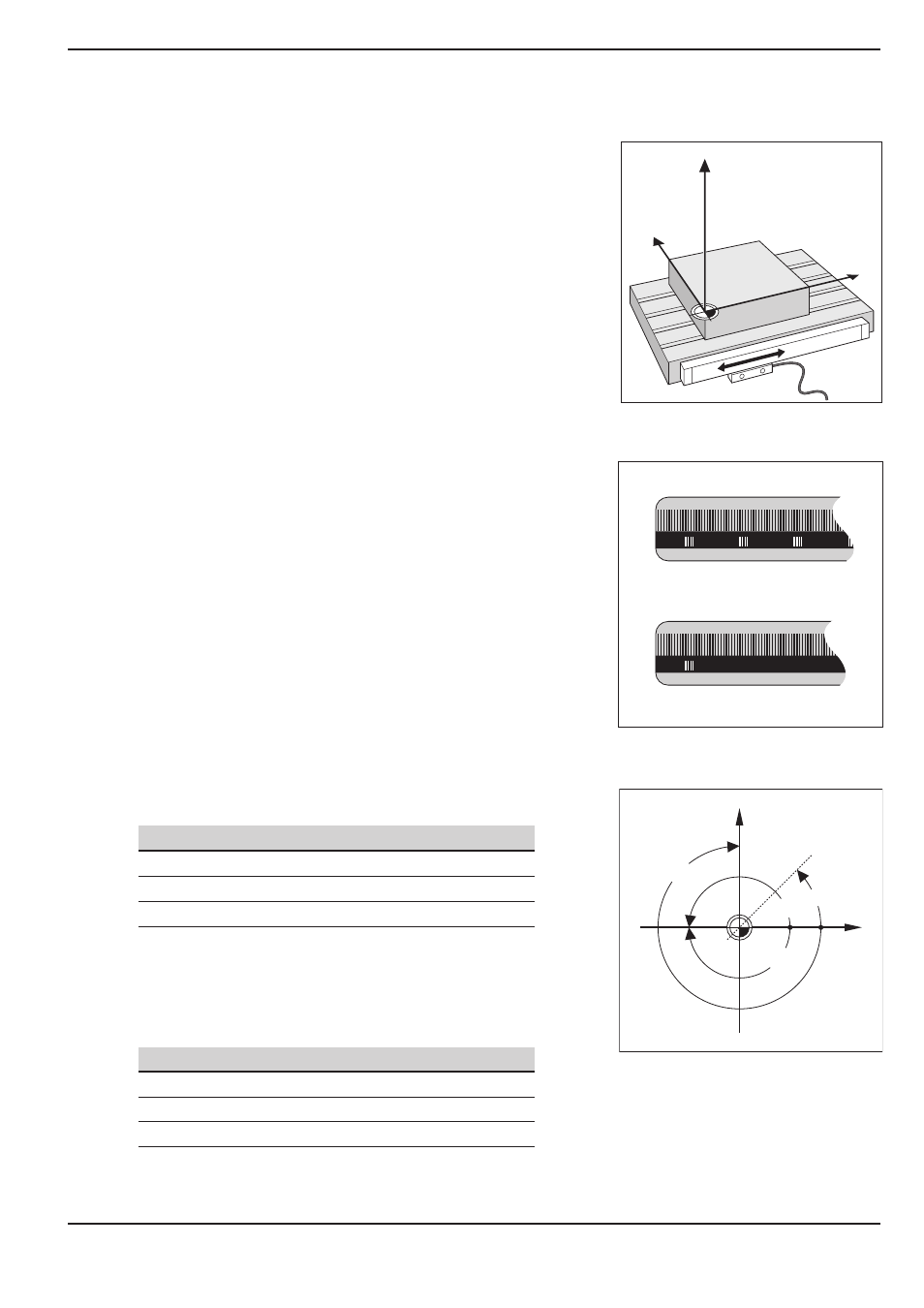
Systèmes de mesure de déplacement
Les systèmes de mesure de déplacement transforment les dé-
placements des axes de la machine en signaux électriques. Le
POSITIP traite ces signaux, communique la position effective des
axes de la machine et affiche à l'écran cette position sous forme
numérique.
Lors d'une coupure de courant, la relation entre les chariots de la
machine et la position effective calculée est perdue. Grâce aux
marques de référence des système de mesure de déplacement et
à l'automatisme REF du POSITIP, vous pouvez rétablir cette
relation après la remise sous tension.
Axe de référence angulaire
Définition des axes de référence pour les données angulaires:
Plan
Axe de référence angulaire
X Y
+X
Y Z
+Y
Z X
+Z
On a un sens de rotation positif dans le sens anti-horaire si l'on
regarde le plan d'usinage dans le sens négatif de l'axe d'outil
(cf. fig. 10).
Exemple: Angle dans le plan d'usinage X / Y
Angle
correspond à
+
45°
... la moitié de l'angle entre +X et +Y
+/– 180°
... l'axe X négatif
–
270°
... l'axe Y positif
Marques de référence
Les systèmes de mesure de déplacement possèdent une ou
plusieurs marques de référence. A leur franchissement, ces
marques de référence génèrent un signal qui définit pour le
POSITIP une position de la règle comme point de référence (point
de référence règle = point de référence machine).
Lors du franchissement de ces points de référence, le POSITIP
retrouve à l'aide de l'automatisme REF la relation entre les chariots
d'axes et les valeurs d'affichage que vous aviez définis précé-
demment.
Grâce aux systèmes de mesure avec marques de référence à
distances codées, il vous suffit pour cela de déplacer les axes de
la machine sur 20 mm max. (20° avec les systèmes de mesure
angulaire).
Y
X
Z
Y
X
+45°
+180°
–180°
–270°
Fig. 8: Système de mesure de déplacement
pour un axe linéaire, ex. pour l'axe X
Fig. 9: Règles: en haut avec marques de
référence à distances codées, en bas,
avec une marque de référence
Fig. 10: Angle et axe de référence angulaire,
par ex. dans le plan X / Y