Principes de fonctionnement, 8 : fonctionnement de base, 9 : hart – Flowserve 420 IOM Logix Manuel d'utilisation
Page 4: 10 : définition de position, 11 : entrée de commande et commande finale
Positionneur Digital Logix
®
420 FCD LGFRIM0106-06– 12/13
4
Entre l'actionneur et la vanne, il y a des pièces mobiles. Afin d'éviter
les blessures, FLOWSERVE fournit une protection contre les points de
pincement sous la forme de plaques de couverture, en particulier quand
les positionneurs sont montés sur les côtés. Si ces plaques sont retirées
pour inspection, service ou maintenance, une attention spéciale est
requise. A la fin de l'intervention, les plaques de couverture doivent être
remontées.
La réparation d'un positionneur Logix 420 est limitée au remplacement
des sous-assembles et des circuits électroniques avec des produits de
remplacement fabriqués par FLOWSERVE comme défini dans ce manuel.
1
ATTENTION : Avant le retour des produits à FLOWSERVE pour
réparation ou service, on doit fournir à FLOWSERVE un certificat
qui confirme que le produit a été décontaminé et est propre.
FLOWSERVE n'acceptera pas de livraison si le certificat n'a pas été
fourni (un formulaire peut être obtenu auprès de FLOWSERVE).
En sus du mode d'emploi et des directives de prévention d'accident
obligatoires dans le pays où les matériels sont utilisés, toutes les règles
de sécurité reconnues et les bonnes pratiques d'ingénierie doivent être
suivies.
PRINCIPES DE FONCTIONNEMENT
1.8 : Fonctionnement de base
Le positionneur digital Logix 420 est un positionneur digital à deux
entrées 4-20 mA qui utilise le protocole HART afin de permettre une
communication à distance. Le positionneur est alimenté par le signal
d'entrée 4-20 mA. Le courant de démarrage doit au moins être égal
à 3.8 mA. Le positionneur est configurable au moyen de l'interface
utilisateur locale, d'un outil portable ou du logiciel DTM. Le positionneur
Logix 420 peut contrôler des actionneurs à action pneumatique à simple
effet avec un montage linéaire ou rotatif.
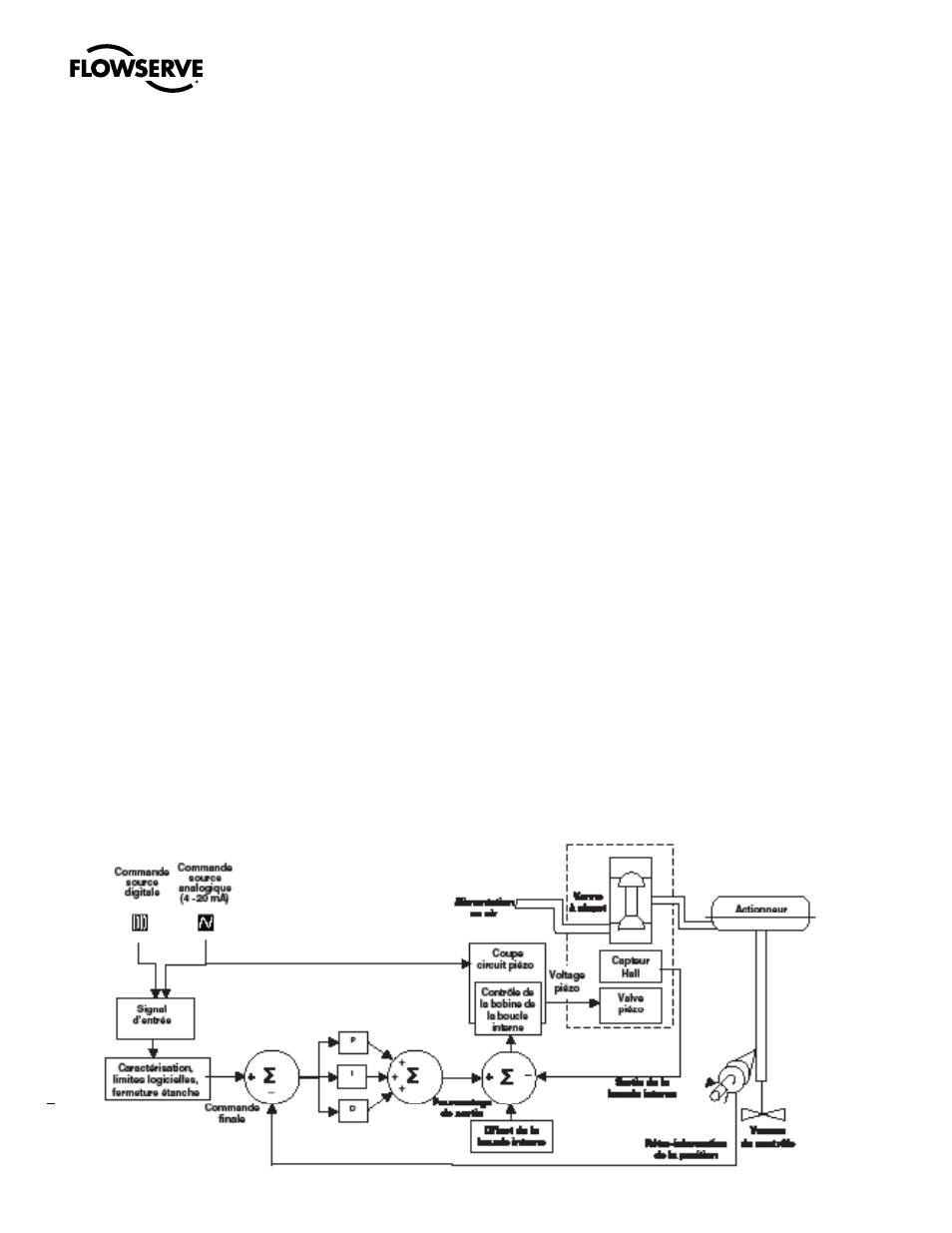
Le positionneur digital Logix 420 est un instrument électronique et
pneumatique en boucle de contrôle fermée. La figure 1 montre le schéma
d'un positionneur Logix 420 installé sur un actionneur linéaire simple effet
pour un un sens d'action air pour ouverture.
1.9 : HART
Le positionneur Logix 420 est alimenté par les deux câbles 4-20 mA
du signal d'entrée. Néanmoins, si ce positionneur utilise le protocole
de communication HART, deux sources peuvent être utilisées pour
le signal de commande : Analogique et numérique. Dans le cas de
source analogique, les signaux 4-20 mA sont utilisés comme source
de commande. Dans le cas de source numérique, le niveau de l'entrée
4-20 mA est ignoré (utilisé seulement pour l'alimentation) et un signal
numérique, envoyé via le protocole de communication HART, est utilisé
comme source de commande. La source de commande est accessible par
le logiciel ValveSight, le communicateur HART 375, ou autres logiciels.
Voir section 11 COMMUNICATION HART COMMUNICATION HART pour
plus d'information.
1.10 : Définition de position
Que ce soit en source numérique ou analogique, la position à 0 % est
toujours définie comme la position fermée de la vanne et la position
à 100 % comme la position ouverte de la vanne. Dans le cas de
source analogique, les signaux 4-20 mA sont convertis en position
(en pourcentage). Pendant la calibration de la boucle, les signaux
correspondant à 0 % et 100 % sont définis.
1.11 : Entrée de commande et commande finale
Le signal d'entrée de commande (en pourcentage) passe dans un bloc de
caractérisation ou de modification de limites. Cette fonction est effectuée
par logiciel, ce qui permet un ajustement sur le terrain par le client. Le
bloc de caractérisation peut appliquer aucun ajustement (linéaire), une
ou plusieurs des courbes d'ajustement de caractérisation prédéfinies
Figure 1 : Principe de fonctionnement du Logix 420