1 principes de base, Système de référence, 1 pr incipes de base 4.1 principes de base – HEIDENHAIN TNC 410 ISO Programming Manuel d'utilisation
Page 64
38
4 Programmation: Principes de base, gestion de fichiers, aides à la programmation, gestionnaire de palettes
4.1 Pr
incipes de base
4.1 Principes de base
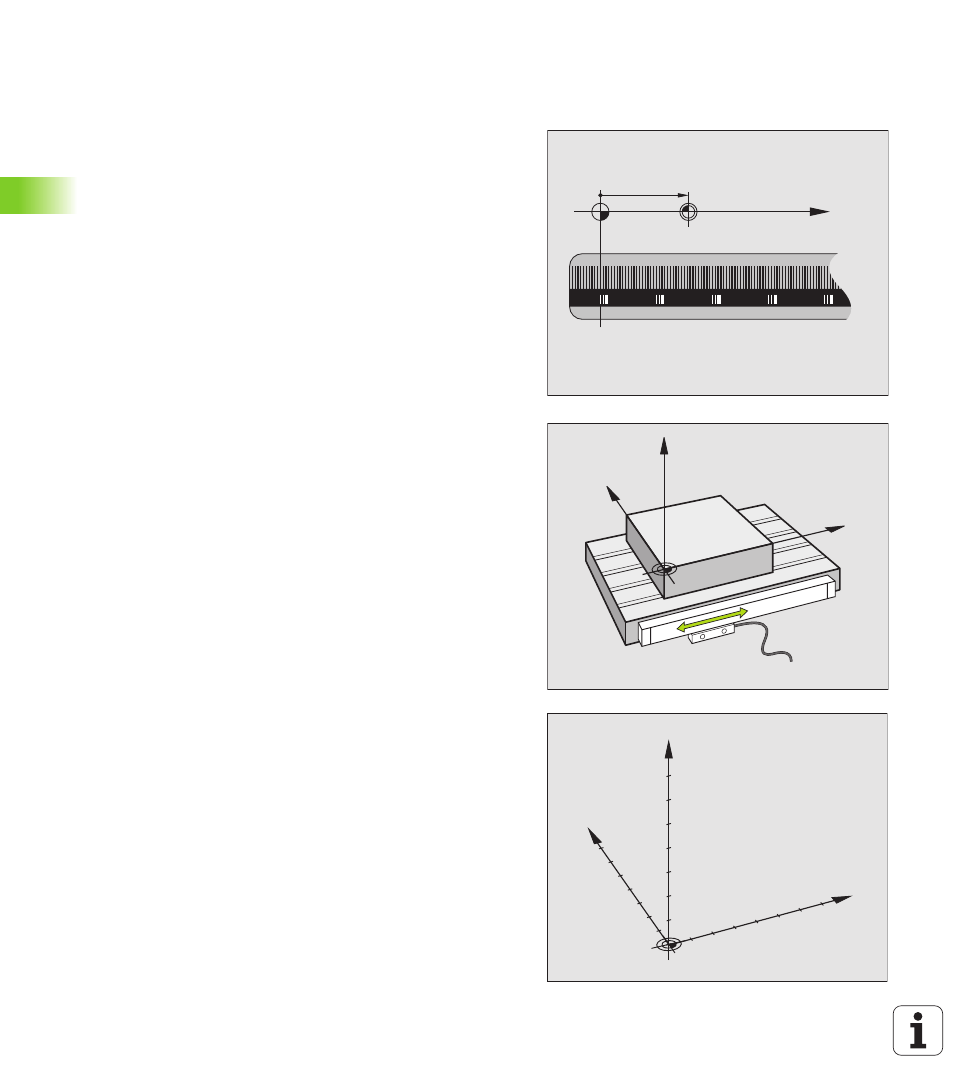
Systèmes de mesure de déplacement et
marques de référence
Des systèmes de mesure situés sur les axes de la machine
enregistrent les positions de la table ou de l'outil. Lorsqu'un axe de la
machine se déplace, le système de mesure correspondant génère un
signal électrique qui permet à la TNC de calculer la position effective
exacte de l'axe de la machine.
Une coupure d'alimentation provoque la perte de la relation entre la
position du chariot de la machine et la position effective calculée. Pour
rétablir cette relation, les règles de mesure des systèmes de mesure
de déplacement disposent de marques de référence. Lors du
franchissement d’une marque de référence, la TNC reçoit un signal qui
désigne un point de référence machine. Celui-ci permet à la TNC de
rétablir la relation entre la position effective et la position actuelle du
chariot e la machine.
Les axes linéaires disposent généralement de systèmes de mesure
linéaire. Les plateaux circulaires et axes pivotants sont équipés de
systèmes de mesure angulaire. Pour rétablir la relation entre la
position effective et la position actuelle du chariot de la machine, il
vous suffit d'effectuer un déplacement max. de 20 mm avec les
systèmes de mesure linéaire avec marques de référence à distances
codées, et de 20° max. avec les systèmes de mesure angulaire.
Système de référence
Un système de référence vous permet de définir sans ambiguïté les
positions dans un plan ou dans l’espace. La donnée de position se
réfère toujours à un point défini; elle est décrite au moyen de
coordonnées.
Dans le système de coordonnées cartésiennes, trois directions sont
définies en tant qu'axes X, Y et Z. Les axes sont perpendiculaires entre
eux et se rejoignent en un point: le point zéro. Une coordonnée indique
la distance par rapport au point zéro, dans l’une de ces directions. Une
position est donc décrite dans le plan au moyen de deux coordonnées
et dans l’espace, au moyen de trois coordonnées.
Les coordonnées qui se réfèrent au point zéro sont désignées comme
coordonnées absolues. Les coordonnées relatives se réfèrent à une
autre position quelconque (point de référence) du système de
coordonnées. Les valeurs des coordonnées relatives sont aussi
appelées valeurs de coordonnées incrémentales.
X (Z,Y)
X
MP
Y
X
Z
Y
X
Z