Annexe, Mappage dans le coupleur de bus – BECKHOFF KL5001 Manuel d'utilisation
Page 18
Annexe
16
KL5001
Annexe
Comme déjà décrit au chapitre Configuration des bornes, chaque borne de
bus est mappée dans le coupleur de bus. Ce mappage se réalise dans le
cas standard avec les préréglages du coupleur de bus / borne. Il est
possible de modifier ce réglage par défaut à l’aide du logiciel de
configuration Beckhoff KS2000 ou avec un logiciel de configuration maître
(p.ex. ComProfibus ou TwinCAT System Manager). Les tableaux suivants
donnent des renseignements sur le mappage de la KL5001 dans le
coupleur de bus, en fonction des paramètres réglés.
Mappage dans le coupleur de bus
Format standard
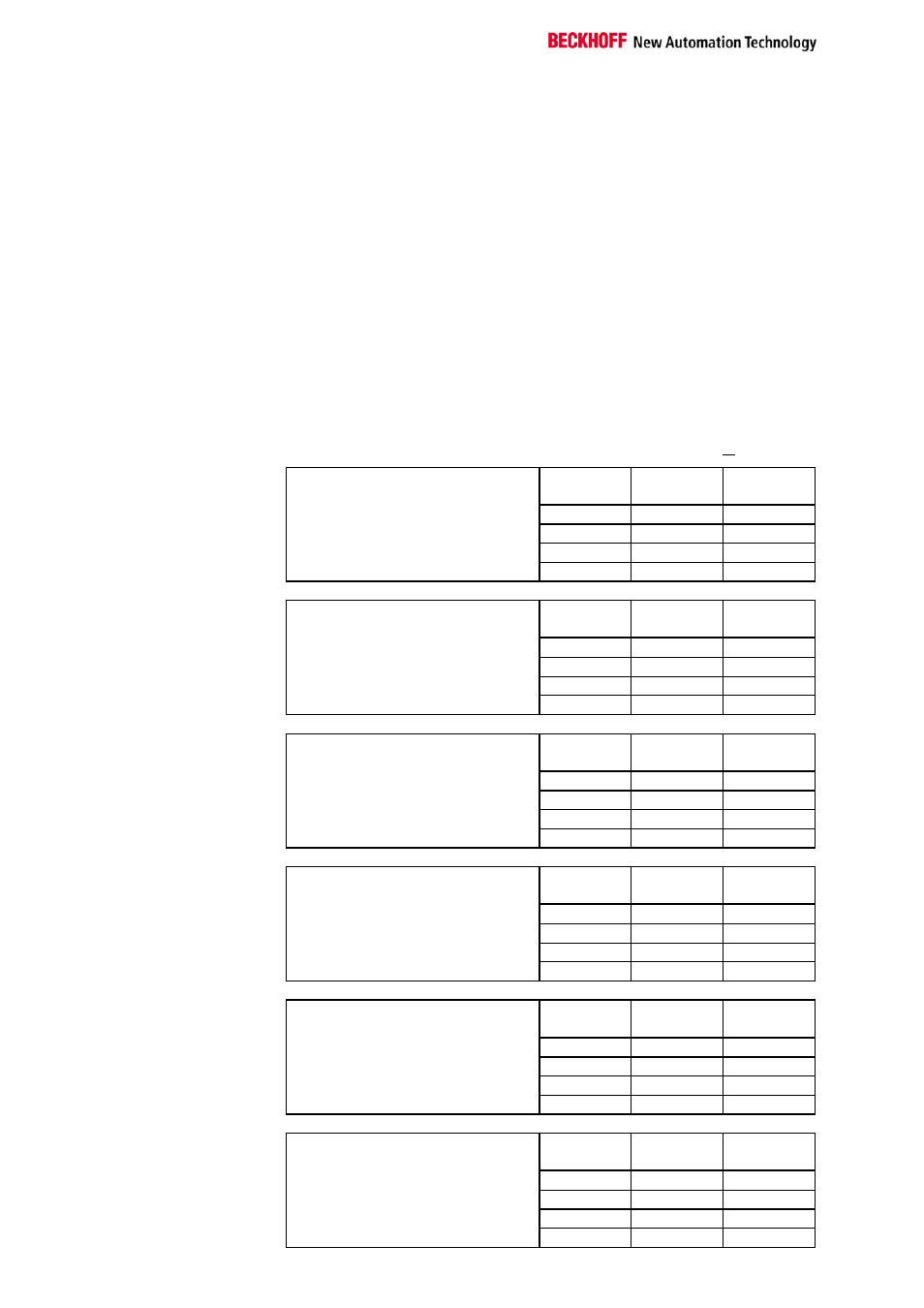
La KL5001 est mappée dans le coupleur de bus en fonction des
paramètres réglés. Si la borne est complètement évaluée, elle occupe un
espace mémoire au sein de l’image de processus des entrées et sorties.
Décalage
E/S
Octet de
poids fort
Octet de
poids faible
Évaluation complète = 0
3
Format MOTOROLA = 0
2
Alignement mot
= X
1
D3
D2
0
D1
D0
Décalage
E/S
Octet de
poids fort
Octet de
poids faible
Évaluation complète
= 0
3
Format MOTOROLA = 1
2
Alignement mot
= X
1
D0
D1
0
D2
D3
Décalage
E/S
Octet de
poids fort
Octet de
poids faible
Évaluation complète
= 1
3
Format MOTOROLA = 0
2
D3
Alignement mot
= 0
1
D2
D1
0
D0
CT/ST
Décalage
E/S
Octet de
poids fort
Octet de
poids faible
Évaluation complète
= 1
3
Format MOTOROLA = 1
2
D0
Alignement mot
= 0
1
D1
D2
0
D3
CT/ST
Décalage
E/S
Octet de
poids fort
Octet de
poids faible
Évaluation complète
= 1
3
Format MOTOROLA = 0
2
D3
D2
Alignement mot
= 1
1
D1
D0
0
-
CT/ST
Décalage
E/S
Octet de
poids fort
Octet de
poids faible
Évaluation complète
= 1
3
Format MOTOROLA = 0
2
D0
D1
Alignement mot
= 1
1
D2
D3
0
-
CT/ST